
Course Format
Skills Level
Duration
Q&A
Feedback
Lecture Type

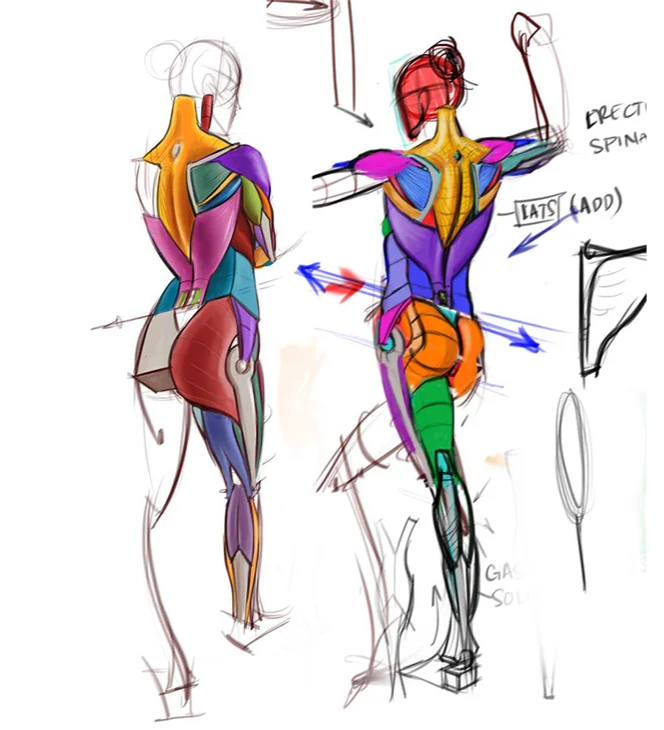
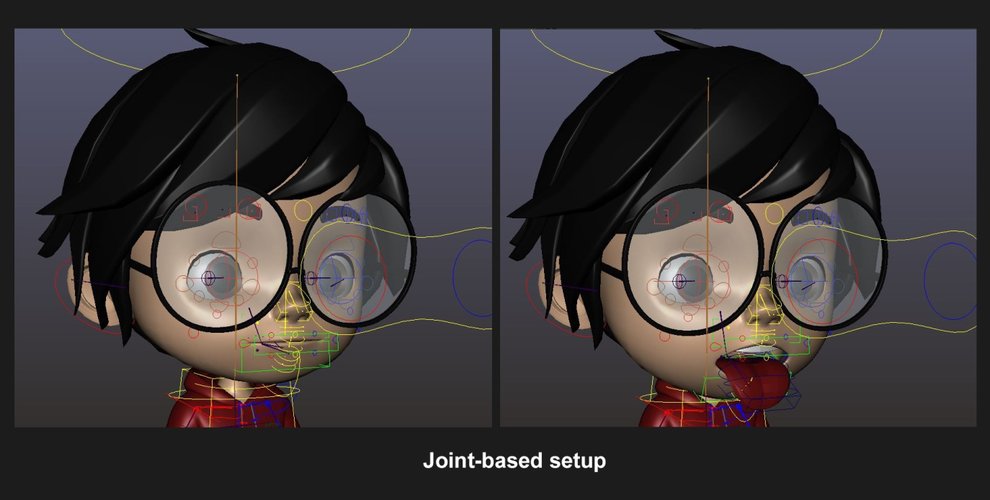
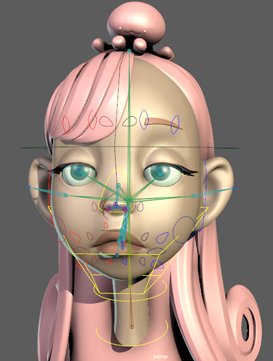
Instructor's Gallery

3x Payments
$233
2x Payments
$349.50
Full payment
$699

Receive personalized feedback on all assignments from the industry’s top professionals.
Enjoy lifetime access to the spectrum of course content, including lectures, live Q&As, and feedback sessions.
Show off your Certification of Completion when you turn in 80% of course assignments.
Learn anywhere, anytime, and at your own pace with flexible, online course scheduling.

We can help with admissions questions, portfolio review/course recommendations!